L’energia meccanica è una grandezza fisica scalare che caratterizza un sistema meccanico.
Nell’ambito della cinematica, della dinamica e dell’elettromagnetismo, abbiamo già incontrato diversi tipi di energia:
- L’energia cinetica di un punto materiale di massa $m$, che si muove con velocità $\vec{v}$:$$K = \frac{1}{2} m \ v^2$$
- L’energia potenziale della forza peso, posseduta da un punto materiale di massa $m$ situato ad un’altezza $h$ dal suolo e soggetto all’accelerazione gravitazionale $\vec{g}$:$$\mathcal{U}_{\text{peso}} = m\ g\ h$$
- L’energia potenziale della forza elastica, posseduta da una molla di costante elastica $k$ e soggetta ad un’elongazione $x$:$$\mathcal{U}_{\text{elastica}} = \frac{1}{2} k x^2$$
- L’energia potenziale elettrostatica, posseduta da una carica $q$ posta a una distanza $r$ da un’altra carica $Q$ nel vuoto:$$\mathcal{U}_{\text{elettrostatica}} = - \frac{1}{4 \pi \varepsilon}\frac{q \ Q}{r}$$
- L’energia potenziale gravitazionale, posseduta da una massa $m$, posta a distanza $r$ da un’altra massa $M$ nel vuoto:$$\mathcal{U}_{\text{gravitazionale}} = - G \frac{m \ M}{r}$$
L’energia è una funzione additiva, in questo senso: se un sistema fisico è costituito da più punti materiali o corpi, l’energia totale del sistema è pari alla somma (algebrica) delle singole energie possedute da ognuna delle sue parti. Ricordiamo che l’energia cinetica può assumere solo valori positivi, mentre altri tipi di energia possono anche assumere valori negativi.
Affrontando l’argomento del lavoro, abbiamo anche incontrato una tipologia di forze: le forze conservative. Esse sono le forze per le quali il lavoro svolto per un qualunque spostamento non dipende dalla forma geometrica della traiettoria seguita, ma solo dai punti di inizio e di arrivo (e da altre caratteristiche intrinseche del corpo in questione, come massa, carica, costante elastica, eccetera). Per tutte queste forze è possibile definire una funzione scalare $\mathcal{U}$, detta energia potenziale, tale per cui il lavoro $\mathcal{L}_{A \to B}$ fatto per spostare il sistema fisico dalla configurazione $A$ alla configurazione $B$ (indipendentemente dal percorso o dalle modalità seguite) può essere calcolato come l’opposto della variazione di energia potenziale:$$\mathcal{L}_{A \to B} = -\Delta \mathcal{U} = \mathcal{U}(A) - \mathcal{U}(B)$$L’energia potenziale è così associata ad un certo tipo di forze. In presenza di un sistema fisico dotato di energia cinetica $K$ ed energia potenziale $\mathcal{U}$ definiamo l’energia meccanica del sistema come la somma algebrica di energia cinetica ed energia potenziale:$$E = K + \mathcal{U}$$Notiamo che energia cinetica ed energia potenziale sono grandezze omogenee:
- L’energia cinetica $K$ è pari a $\frac{1}{2} m v^2$, e quindi ha le dimensioni di un lavoro: difatti, ricordando che il lavoro si misura in joule $\text{J}$, o newton al metro, $[K] = \left[\frac{1}{2}\right][m][v^2] = [m]\left[ \frac{l^2}{s^2} \right] = \left[\frac{m\ l}{s^2} \right] [l] = \text{ N} \text{ m} = \text{ J}$.
- Anche l’energia potenziale ha le dimensioni di un lavoro: proprio per sua definizione, le sue variazioni sono un lavoro.
Di conseguenza, anche l’energia meccanica viene calcolata in joule (o qualsiasi grandezza equivalente).
Ora, l’energia meccanica deve la sua importanza al seguente fatto: durante l’evoluzione temporale di un sistema fisico, in cui agiscano solo forze conservative, l’energia meccanica rimane costante. Questo fatto fondamentale prende il nome di principio di conservazione dell’energia meccanica. Esso è un fatto, che non può essere dimostrato come un teorema o una proposizione, ma che si verifica sempre e costantemente, in tutti gli esperimenti e in tutti i casi a noi noti: lo assumiamo dunque come legge. In base ad esso possiamo ben vedere che, sebbene energia cinetica ed energia potenziale possano variare di valore durante il movimento di un sistema fisico, la somma algebrica di questi due valori rimane sempre fissato. Si può dunque asserire che l’energia meccanica è una costante del moto.
L’energia meccanica invece non viene, in generale, mantenuta da forze non conservative: ad esempio, le forze di attrito sono in grado di dissipare energia meccanica, così come componenti resistivi di un circuito possono dissipare la potenza erogata da un generatore.
Anche se l’energia meccanica viene dissipata, introducendo come nuova forma di energia il calore, è possibile riottenere un equilibrio energetico durante l’evoluzione temporale di un sistema fisico: si tratta del primo principio della termodinamica. Ad esempio, corpi che si fermano per attrito sviluppano calore, e componenti resistivi attraversati da corrente elettrica sono soggetti all’effetto Joule, per il quale si riscaldano: sebbene l’energia meccanica non venga conservata, anzi diminuisca, essa viene trasformata in energia termica.
Anche se nella realtà tutta l’energia meccanica sviluppata viene intaccata dalla presenza di forze dissipative, questi effetti sono di minima entità, e la conservazione dell’energia meccanica è un utile strumento per prevedere il comportamento di un sistema fisico: gran parte delle forze che si incontrano nella vita di tutti i giorni (prime fra tutti, forza gravitazionale e forza elettrostatica) sono forze conservative.
In base al principio di conservazione dell’energia meccanica è possibile dimostrare il teorema delle forze vive. Questa nomenclatura si deve a Leibniz, che chiamò l’energia cinetica vis viva (“forza viva”, in latino), in contrapposizione alla vis mortua, che identificava invece l’inerzia, o la capacità di un corpo di resistere ai tentativi di modificare la propria veliocità.
Teorema (delle forze vive o dell’energia cinetica)
In un sistema meccanico caratterizzato da sole forze conservative, il lavoro svolto da queste far evolvere il sistema è pari alla variazione di energia cinetica registrata nel sistema stesso. In una formula,$$\mathcal{L} = \Delta K$$
Dimostrazione
Sia $K$ l’energia cinetica del sistema e $\mathcal{U}$ la sua energia potenziale, di modo che la quantità $E = K + \mathcal{U}$ rimanga invariata nell’evoluzione del sistema meccanico, in base al principio di conservazione dell’energia meccanica. Supponiamo ora di far evolvere il sistema da una configurazione $A$ ad una configurazione $B$. Se una quantità rimane invariata, la sua variazione è nulla: dunque, per il nostro sistema meccanico, $\Delta_{A \to B} \ E = E(B) - E(A) = 0$. Ora sostituiamo in questa formula la definizione di energia meccanica:$$ K(B) + \mathcal{U}(B) - \left( K(A) + \mathcal{U}(A) \right) = 0 \ \Rightarrow \ K(B) + \mathcal{U}(B) = K(A) + \mathcal{U}(A) \ \Rightarrow \ K(B) - K(A) = \mathcal{U}(A) - \mathcal{U}(B)$$da cui deduciamo che$$ \Delta_{A \to B} K = -\Delta_{A \to B} \mathcal{U} $$Ricordiamo la definizione di energia potenziale, secondo cui il lavoro compiuto dalle forze è pari all’opposto della variazione di energia potenziale: $ \mathcal{L}_{A \to B} =\mathcal{U}(A) - \mathcal{U}(B) $. Sostituendo questa nell’espressione precedentemente ottenuta, arriviamo alla formula$$ \Delta_{A \to B} K = \mathcal{L}_{A \to B}$$Con questo, il teorema è dimostrato.
Di seguito forniamo alcuni esempi di come utilizzare la conservazione dell’energia meccanica per risolvere degli esercizi proposti.
Esercizio
Una pallina di massa $m = 60 \text{ g}$ è appesa a un filo inestensibile. Assunto come livello di riferimento la posizione di riposo $C$, determina l’energia potenziale gravitazionale, l’energia cinetica e l’energia meccanica totale nelle seguenti situazioni:
- quando inizia la discesa dal punto $A$, che è più in alto rispetto a $C$ di $8 \text{ cm}$;
- quando si trova in $B$, $3 \text{ cm}$ più in basso rispetto ad $A$;
- quando arriva al livello più basso in $C$
Dopodichè: calcola la velocità della pallina quando transita per C; stabilisci se la pallina riesce a risalire fino al punto $D$, situato $2 \text{ cm}$ più in alto di $A$, e, in caso di risposta negativa, motivala e indica l’altezza massima alla quale può risalire.
Svolgimento
Ricordiamo innanzitutto l’espressione dell’energia potenziale della forza peso, posseduta da un grave di massa $m$ situato ad un’altezza $h$ dal suolo e soggetto all’accelerazione gravitazionale $\vec{g}$: $\mathcal{U} = m\ g\ h$. Nel nostro caso, il livello del “suolo” è il punto $C$, che viene infatti indicata come “posizione di riposo”, e in tutte le espressioni dell’energia potenziale l’altezza sarà relativa a questo livello.
Detto questo, procediamo con lo svolgimento.
Nel punto $A$, il corpo inizia la sua discesa: visto che non viene specificato altro, dobbiamo supporre che esso parta da fermo, ossia che la sua velocità sia inizialmente nulla: $v = 0$. Di conseguenza, nel punto $A$ l’energia cinetica è nulla: $K = \frac{1}{2} m v^2 = 0$. L’energia potenziale, invece, va calcolata prendendo come riferimento l’altezza $h_A$ di $A$ rispetto a $C$: il testo ci informa che $h_A = 8 \text{ cm} = 8 \cdot 10^{-2} \text{ m}$, e quindi l’energia potenziale in $A$ è $\mathcal{U} (A) = m\ g\ h_A = 6 \ 10^{-2} \cdot 9.8 \cdot 8 \ 10^{-2} = 4.7 \ 10^{-2} \text{ J}$. L’energia meccanica, somma di energia potenziale ed energia cinetica, è $E = 0 + 4.7 \ 10^{-2} = 4.7 \ 10^{-2} \text{ J}$.
Ora facciamoci furbi: la forza peso è una forza conservativa, e quindi possiamo usare il principio di conservazione dell’energia meccanica per asserire che, in qualsiasi istante del suo movimento, la pallina, partendo da ferma da $A$, possiederà sempre e comunque un’energia meccanica di $4.7 \ 10^{-2} \text{ J}$: parte di questa sarà dovuta ad energia cinetica, parte ad energia potenziale. Questo ci evita di calcolare l’energia meccanica in tutti gli altri punti. Da notare che la pallina possiede questa energia solo se parte dal punto $A$ e parte ferma. Variando una di queste due condizioni varia anche l’energia meccanica da essa posseduta.
Il punto $B$, è situato $3 \text{ cm}$ sotto $A$, quindi la sua altezza relativa su $C$ è $h_B = 5 \text{ cm}$. L’energia potenziale nel punto $B$ è quindi data da $\mathcal{U} (B) = m\ g\ h_B = 6 \ 10^{-2} \cdot 9.8 \cdot 5 \ 10^{-2} = 2.94 \ 10^{-2} \text{ J}$. Questa energia non è sufficiente a raggiungere il livello di energia meccanica del sistema: l’eccesso sarà quindi colmato da energia cinetica, che il corpo viene ad acquistare durante la caduta. Di conseguenza, $K = E - \mathcal{U}$, ossia $ K = 4.7 \ 10^{-2} - 2.94 \ 10^{-2} = 1.76 \ 10^{-2} \text{ J}$.
Il punto $C$ è il punto rispetto al quale le altezze vengono calcolate: la sua altezza relativa, quindi è nulla, $h_C = 0$. Come conseguenza, l’energia potenziale a questo livello è anch’essa nulla: $\mathcal{U} (C) = 0$. Quindi, la totalità dell’energia meccanica posseduta dalla pallina deve essere cinetica: $E = K + 0 \ \Rightarrow \ K = 4.7 \ 10^{-2} \text{ J}$.
Ora calcoliamo la velocità della pallina quando passa dal punto $C$ (essendo partita da $A$): dall’espressione per l’energia cinetica, otteniamo quella per la velocità:$$ K = \frac{1}{2} m v^2 \quad \Rightarrow \quad v^2 = 2\frac{K}{m}, v = \sqrt{ \frac{ 2 K}{m} }$$Il segno ottenuto da questa formula è sicuramente positivo (un’eventuale ambiguità è dovuta al fatto che la pallina, passando da $C$, può cadere o risalire): ricordiamo che la velocità, in generale, è una quantità vettoriale, e, come tale, dotata di modulo, direzione e verso; l’espressione dell’energia cinetica coinvolge (e quindi ci permette di determinare) solo il modulo della velocità, non direzione o verso, che devono essere determinati in altro modo. Nel nostro caso, il modulo della velocità vale $\sqrt{ 2\frac{K}{m} } = \sqrt{ 2\frac{4.7 \ 10^{-2}}{6 \ 10^{-2}} } = \sqrt{1.57} = 1.25 \text{ m} / \text{ s}$, la direzione è verticale e il verso è verso il basso, dato che la pallina cade dall’alto al basso.
Ora la parte più difficile: dobbiamo stabilire se la pallina possa risalire sino a $D$, situato a $2 \text{ cm}$ sorpa $A$ (sempre nell’ipotesi che inizi a muoversi proprio da $A$). Facciamo l’ipotesi ulteriore che, comunque la pallina “risalga”, siano coinvolti processi conservativi, di modo che l’energia meccanica $E$ rimanga sempre costante. Ora, restando costante $E$, cerchiamo di ottenere l’energia cinetica che la pallina dovrebbe avere se potesse risalire sino a $D$: nel punto $D$ l’altezza relativa rispetto a $C$ è $h_D = 10\text{ cm}$, di conseguenza si avrebbe $K = E - \mathcal{U} = E - m\ g\ h_D = 4.7 \ 10^{-2} - 6 \ 10^{-2} \cdot 9.8 \cdot 10\ 10^{-2} = 4.7 - 5.88 = -1.18 \ 10^{-2} \text{ J}$; se da qui volessimo cercare la velocità posseduta dalla pallina nel punto $D$, come fatto in precedenza per il punto $C$, ci troveremmo in un inghippo: dalla formula otteniamo $ v^2 = 2\frac{K}{m} = -3.93 \ 10^{-1} $, che è impossibile, dato che il quadrato di un qualsiasi numero è sicuramente un numero positivo. Quindi concludiamo che il punto $D$ è irraggiungibile, sotto l’ipotesi che non intervengano altre forze o forze di tipo dissipativo.
Il motivo algebrico è chiaro: un quadrato non può essere negativo. Ma il motivo fisico qual è? Ricordiamo che la velocità della pallina, nel punto $A$ dal quale parte, è $0$, e l’energia meccanica è tutta potenziale; man mano che la pallina scende, la sua energia potenziale diminuisce, in ragione di una diminuita altezza rispetto al “suolo” $C$, mentre la sua energia cinetica, e di conseguenza la sua velocità, aumenta. Possiamo vedere la questione nel verso opposto: supponiamo che la pallina schizzi verso l’alto, partendo dal punto $C$, con una velocità di $1.25 \text{ m} / \text{ s}$: in questo caso, salendo la pallina aumenterebbe la propria energia potenziale, a scapito dell’energia cinetica, la riduzione della quale comporterebbe una conseguente riduzione della propria velocità, anzi più precisamente, una riduzione del modulo della propria velocità. Ma il modulo della velocità (essendo la lunghezza di un vettore) può valere al minimo $0$, oltre non può andare. Partendo proprio con quella velocità da $C$, la pallina non potrà far altro che raggiungere il punto $A$, poichè per spostarsi al di là di essa il contributo all’energia meccanica da parte dell’energia cinetica dovrebbe essere negativo, il che non può accadere.

Esercizio
Supponiamo di volere far decollare un razzo dalla superficie terrestre: stabilire la velocità minima con la quale esso deve partire per poter sfuggire all’attrazione gravitazionale della Terra. Si prendano come valore di riferimento il raggio medio terrestre $R= 6.4 \cdot 10^{6}$, la massa terrestre $M = 6 \cdot 10^{24}$.
Svolgimento
La velocità minima richiesta da un satellite per sfuggire all’attrazione gravitazionale di un pianeta si dice velocità di fuga. Ricordiamo che due gravi di masse $m$ ed $M$, posti a una distanza $r$ l’uno dall’altro, in base alla legge di gravitazione universale sviluppano un’energia potenziale data dalla formula$$\mathcal{U}_{\text{grav.}} = - G \frac{m \ M}{r}$$Ricordiamo che la costante di gravitazione universale $G$ vale, in unità del sistema internazionale, $6.67 \ 10^{-11} \text{ Nm}^2 \ / \text{ kg}^2$. Nel nostro caso, la massa $M$ rappresenta il pianeta Terra, che penseremo inamovibile per semplicità; il razzo avrà massa $m$, ed inizialmente sarà situato sulla superficie terrestre: dunque, il centro di massa della terra e il centro di massa del razzo saranno ad una distanza pari al raggio medio terrestre $R$. Partendo con una velocità $v$, il razzo possiederà un’energia cinetica $K$ pari a $\frac{1}{2} m v^2$, e dunque possiederebbe un’energia meccanica, costante durante il moto, pari a$$E = K + \mathcal{U}_{\text{grav.}} = \frac{1}{2} m v^2 - G \frac{m \ M}{R}$$Fissando una velocità di partenza $v$ determineremmo quindi in quali regioni il razzo potrebbe muoversi, in una situazione esemplificata dall’illustrazione seguente:
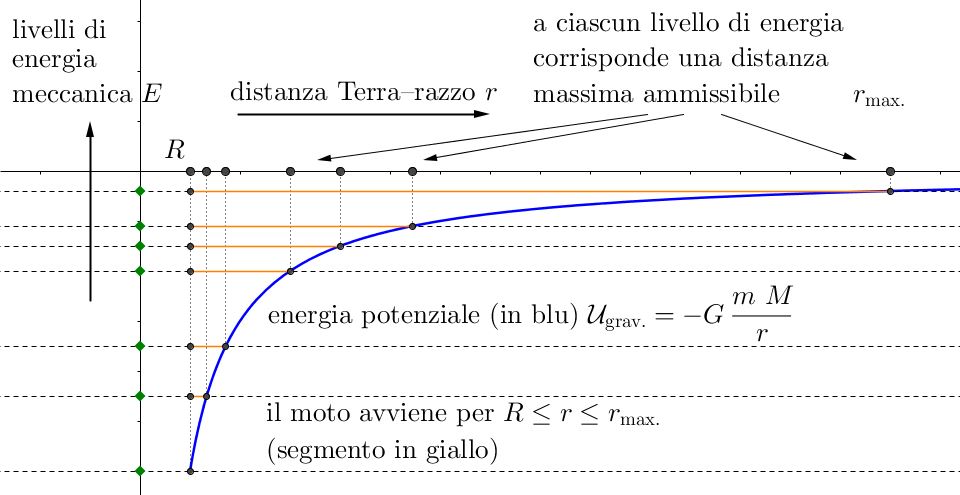
Come si vede, per livelli energetici troppo bassi la distanza $r$ tra razzo e pianeta Terra non può superare un certo valore $r_{\text{max.}}$ (e mai essere inferiore al raggio terrestre $R$, a meno di non scavare delle buche). Se vogliamo far fuggire il razzo, queste limitazioni non devono esistere: l’energia cinetica inizialmente fornita al razzo deve controbilanciare completamente l’energia potenziale gravitazionale che tiene la Terra e il razzo legati. Dobbiamo quindi imporre che $K = -\mathcal{U}$, di modo che, al netto, avremmo $E = 0$, il che permetterebbe al razzo di scappare alla gravità terrestre. Imponendo tale condizione, arriviamo all’equazione$$\frac{1}{2} m v^2 = G \frac{m \ M}{R} \quad \Rightarrow \quad v^2 = 2 G \frac{\not{m} \ M}{R \ \not{m}} \ \Rightarrow \ v = \sqrt{2 G \frac{M}{R}}$$Sostituendo i dati in nostro possesso, otteniamo$$ v_{\text{fuga}} = \sqrt{2 G \frac{M}{R}} = \sqrt{2 6.67 \ 10^{-11} \frac{6 \ 10^{24}}{6.4 \ 10^{6}}} = 1.12 \cdot 10^{4} \text{ m} / \text{s}$$Convertendo il risultato ottenuto in kilometri all’ora, si ottiene una velocità di fuga di $4.03 \cdot 10^{4} \text{ km} / \text{h}$. Notiamo che la velocità di fuga non dipende dalla massa del razzo: scagliando qualsiasi oggetto (di una massa non confrontabile con quella terrestre, mi raccomando!) a una velocità di circa $40000 \text{ km} / \text{h}$ verso l’alto, questo partirebbe in orbita.